Review
- We’ve touched upon oscillations when doing central force problems, in particular oscillations about an equilibrium position
- We did this using Taylor expansions
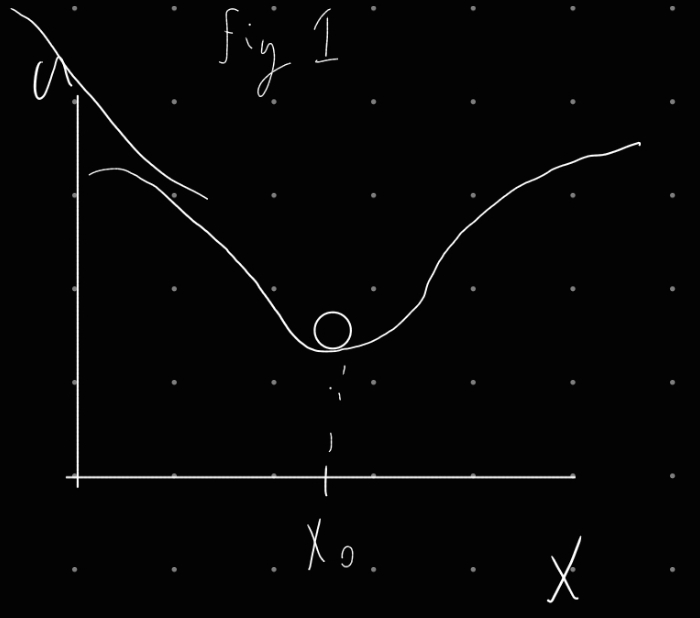
- We were trying to find a potential as a function of Taylor-expanded around a position
Where was the equilibrium position.
- This tells us the potential at a point can be represented by a Taylor Series
Forces
We can model the forces acting upon the object with
where
For oscillations about equilibrium point, the second term always goes to 0 as per above.
Now onto new material
Starting with force
Slight difference from above, we start with force instead of potential
At point ,. At equilibrium the force vanishes so the particle doesn’t leave equilibrium. Then we can ignore order in the force Taylor expansion. This would be order in the potential expansion.
We get
Where
This looks like Hooke’s law. Gives solutions for oscillations, but only small ones. Life is sometimes complicated…
Simple Harmonic Oscillator (SHO)
We will define as
Rearrange:
or
Solutions to above differential equations take the form of
From this position we can find kinetic and potential energies. Lets do that
Kinetic energy is found by taking the time derivitave of force
Potential energy is calculated from work.
Integrate both sides
Where and are time independent.
Energy conservation !!
However, this is very idealized. Not everything is so nice in real life
We however can find some useful info from this, such as the period of oscillation (time to return to starting point)
Assuming
@ and
This happens when Period is given by:
= angular frequency
And frequency is given by:
Both period and frequency are functions of mass and the spring constant. They are independent of amplitude.
This is how they measure how heavy things are in space. they put astronauts in the astronaut oscillator.
This is assuming small oscillations tho… so at larger amplitudes it densest quite work.
So far we assumed an ideal system (no friction or slowing force)
This means oscillations should continue forever. This isn’t super realistic, since it doesn’t account for damping forces which stop the oscillator.
yapping interlude
yapping… i wish people would wait for the professor to call on them…
more yapping…
larrrggeee very massive bodies yeah im talki- what im saying is- but anyway but-
cool sidenote on the fabric of spacetime from Dr. Martin
i think the way you explained it is a little odd our favorite math major to Dr Martin
uhhh… are talking about hawking radiation or something else (has absolutely nothing to do with hawking radiation)
sorry i love digging down physics rabbit holes… lets move on
Damped SHO
Assume the damping force is a function of the velocity and not position of the oscillator. To do this, add a term to our differential equation.
Add damping
where This is the differential equation for damping
or
Where is known as the damping parameter
The roots of the damping differential equation are the following:
Solutions to the differential equation are:
3 Interesting cases
figure 2
In the figure above, A is the over-damped case, B is the critically damped case, and C is the under-damped case
Under damping ()
Condition for underdamping is given by:
Exponentials have imaginary exponents
This can be rewritten as:
Where the first segment is known as the “envelope” and the second segment is the oscillations
NB: unless
Different angular frequency means different periods/frequency
Period is longer for damped then un-damped oscillations.
Critical Damping ()
Critical damping occurs when
This approaches 0 more quickly then the other 2 cases. Brachistachrone Problem? Useful for some physical setups. e.g galvanometer.
screen doors…
Over Damping ()
The condition for an overdamped system is
This is not angular frequency
no oscillations in this case.
Driven, Damped SHO
We are going to use a sinusoidal function as our applied force. Our driving force given by
Putting this into SHO equation
Rewritten
Where is the angular frequency of the driving force
Solutions to this have a complimentary function
by setting the right to 0
Same as before
There is also a particular solution
Plugging this into the diffeq above:
Have orthogonal functions (sin and cos)
coefficients have to vanish to be true
from term
This can be rewritten using trig identities:
fig 3
From
so:
Where
gets damped out is the steady state term
See LC circuit SHO and LRC circut as damped oscillator